所谓密室自动门,就是这门不是轻易能打开的,存在着某些玄关需要你去破解。这里设计的这个门,是通过不断晃动手中的传感器才能开。
有人会说,传感器我知道是那个数字震动传感器,那门呢?你没看错就是舵机,它能控制角度。所以,所谓的门的转动,是靠舵机来完成的。做个来看下效果就知道了~
拓展学习:和12岁小同志搞创客开发:遥控舵机_不脱发的程序猿-CSDN博客
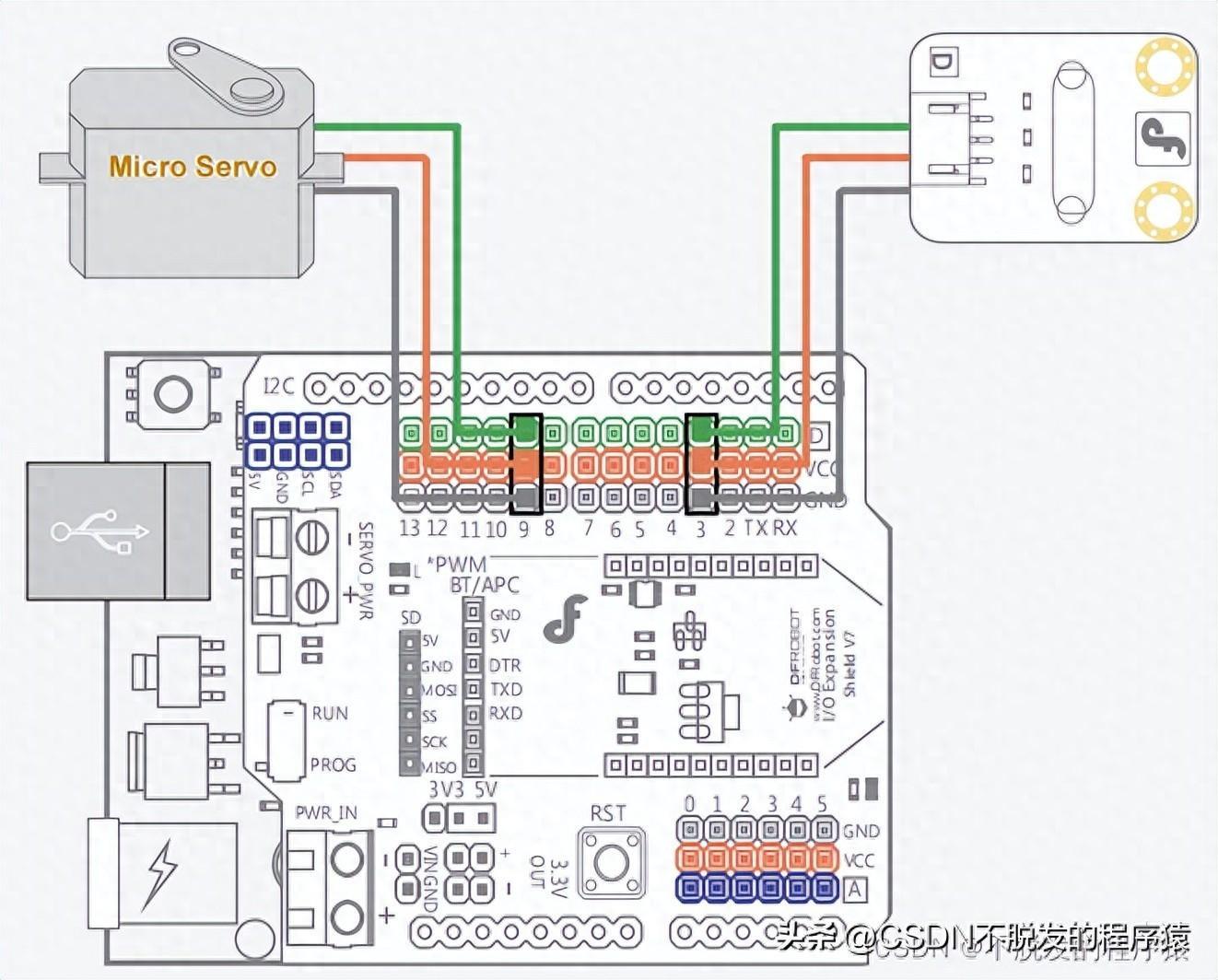
项目连线如下所示:
![]()
实现代码如下所示:
#include
int sensorPin = 3; //震动传感器 – Digital 3
Servo myservo;
int pos = 0;
void setup() {
Serial.begin(9600);
pinMode(sensorPin, INPUT);
myservo.attach(9); //舵机 – Digital 9
}
void loop() {
int sensorState = digitalRead(sensorPin);//读取震动传感器的状态
Serial.println(sensorState);
if(!sensorState){ //一旦状态发生变化,舵机加2°,直到加到180°
pos = pos +2;
if(pos >=180){
pos = 180;
}
myservo.write(pos); //写入舵机的角度
Serial.println(pos); //串口同时输出角度值
delay(100);
} else{ //状态不发生变化,舵机减2°,直到减到0°
pos = pos - 2;
if(pos <=0){
pos = 0;
}
myservo.write(pos);
Serial.println(pos);
delay(100);
}
delay(1);
}代码的开始先调用库:
#include 这个库已经在Arduino IDE中了,可以打开Arduino安装路径,例如我的安装路径:D:\\Arduino\\libraries\\Servo\\src,这就是Servo库所在位置。

![]()
如果要在代码中用库中函数,是不能直接调用的,需要给库找个中介,让“他”建立代码和库中间的关系,也就是类的使用:
Servo myservo;这里的myservo起到的就是这个作用。建立联系,之后调用库中的方法和变量的话,就要按照下面这个模式进行:
myservo.方法名 myservo.变量如何定义舵机是接到那个引脚呢?用到就是attach()方法了。
myservo.attach(引脚ID); //舵机 – Digital 9知道了如何定义一个舵机之后,如何把对应的角度写进去呢?
myservo.write(角度); //写入舵机的角度 最后,运行程序,不断的晃动震动传感器,可以看到舵机的角度会随之变大。停止晃动后,舵机角度又开始慢慢减小。好比一扇门慢慢打开,合上。
本站内容及图片来自网络,版权归原作者所有,内容仅供读者参考,不承担相关法律责任,如有侵犯请联系我们:609448834
